

智能摘要
文章指出90%车牌识别相机调试方式错误,核心问题在于预识别区不足。系统基于视频流工作,每秒捕获25张以上图像,通过多帧识别和投票机制确定车牌。预识别区需确保捕获20-30帧有效图像:低速场景需3-5米,高速场景需5-8米或更长。该区域充足可提升有牌车识别准确率,并增强无牌车和假车牌的识别能力。科学调试预识别区是优化系统稳定性、减少故障的关键措施。
— 此摘要由停车技术员AI分析文章内容生成
此教程新手小白仔细阅读。肯定有那种说:我不按照这个调试也正常使用的,这种人请略过。
同时也欢迎真正的大佬儿指正。
随着汽车普及至每个家庭,停车场已成为我们日常出入的必经之地。然而,相信很多人都遇到过这样的糟心事:道闸前车辆排起长龙,仅仅因为系统无法识别车牌。车牌识别系统一旦“犯糊涂”,拥堵便接踵而至。
问题从何而来?
车牌识别错误的原因多种多样:
- 环境因素:车牌污损、光线过强或过暗、雨雪天气
- 技术因素:图像模糊、识别角度不佳
- 系统本身:最关键而又最容易被忽视的——调试不当,尤其是“预识别区”不足
系统如何工作?
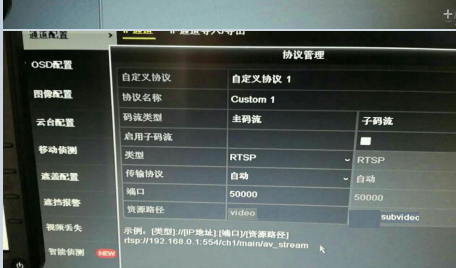
目前主流的车牌识别系统都基于视频流工作。当车辆驶入识别区域,系统一秒钟能捕获25张甚至更多图片并进行识别。
举个例子:车牌“鄂A12345”的车辆进入识别区域。系统在短时间内可能会产生多个结果:“鄂A12345”、“鄂A12346”、“湘A12345”……其中既有正确结果,也有错误干扰。
当车辆触发预设的虚拟线圈时,系统会做一个简单的“民主投票”——选择之前识别结果中出现次数最多的那个车牌,作为最终结果输出,并控制道闸抬起。
简单说就是:多帧识别,单帧触发
解决问题的核心钥匙-预识别区
识别区域与触发线圈之间的距离,就是“预识别区”。这个区域的大小,直接决定了系统的识别准确率。
预识别区为何如此重要?
如何优化?
- 量化距离,科学计算:预识别区长度应根据现场车速设定,确保系统能捕获20-30帧有效图像。低速场景通常需3-5米(一般停车场场景),高速场景需5-8米或更长。
- 摄像头安装要标准:坚持“高位置、小俯角”原则,这是延长预识别区的物理基础。
结语
停车场管理的智能化是必然趋势,而车牌识别系统的稳定性则是智能化的基石。通过科学调试、重点保障充足的预识别区,我们就能给系统装上一双可靠的“远视眼”,让它看得更远、认得更准,从根本上减少系统故障和人工干预,让每一次出行都畅通无阻。
付费阅读
© 版权声明
本站收集的资源仅供内部学习研究软件设计思想和原理使用,学习研究后请自觉删除,请勿传播,因未及时删除所造成的任何后果责任自负。
如果用于其他用途,请购买正版支持作者,谢谢!若您认为「BLOG.SDLINKA.COM」发布的内容若侵犯到您的权益,请联系站长进行删除处理。
本站资源大多存储在云盘,如发现链接失效,请联系我们,我们会第一时间更新。THE END















 停车技术员
停车技术员 


暂无评论内容