




文章摘要
文章解析停车场系统中相机在线(软件透传485)与脱机(协议控屏)两种状态的核心差异。关键点在于:在线时上位管理软件主导控屏,相机仅作为485数据透传通道,功能灵活但依赖软件和网络;脱机时相机自主生成协议指令(如FK、KF),485为输出接口,稳定但逻辑固化。通过车辆入场场景对比,阐明控制权归属(软件vs相机)及485角色(透传管道vs指令生成)的区别,总结在线为“软件指令透传”,脱机为“相机协议强绑定”。
— 此摘要由停车技术员AI分析文章内容生成
不管是做弱电还是做停车了解点基础知识才能迅速解决问题,别人干一天弄不明白你10分钟搞定。如果你认为干一天收一天钱,十分钟就只能收十分钟的钱就没有必要往下看了。
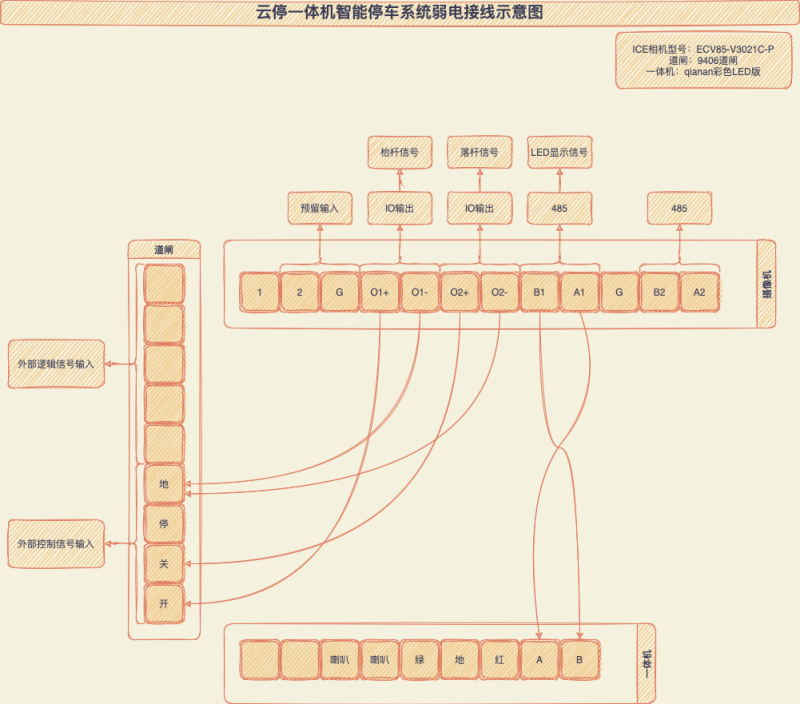
停车场系统中有相机在线(有软件)透传 485 控屏与相机脱机(无软件)协议控屏的情况,要理解其中的差异,需先锚定两种状态的核心逻辑:前者是 “软件主导,相机仅做数据通道”(依赖透传特性),后者是 “相机自主,靠内置逻辑 + 协议控屏”(无中间透传,直接指令交互)。下面从 6 个关键维度拆解差异,并结合停车场实际场景(如车辆入场显示、缴费提示)举例说明,帮你直观理解。
![图片[1]-停车场车牌识别屏显与声音的问题,读懂这个基本全部解决。-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/09/0aa43260-556e-4133-84ff-1cf70a9dc339.webp "停车场车牌识别屏显与声音的问题,读懂这个基本全部解决。")
一、核心定义先明确:两种状态的 “控屏逻辑起点”
在对比前,先厘清两种场景的基础构成,避免混淆:
- 相机在线状态:系统有 “上位软件”(如停车场管理软件,简称 “管理软件”),相机仅负责 “采集车牌 + 透传 485 数据”,不参与控屏决策 —— 控屏指令由管理软件生成,相机像 “管道” 一样把指令传给屏幕。
- 相机脱机状态:无管理软件,相机自身集成 “车牌识别 + 协议解析 + 485 指令生成” 功能,识别到车牌后,直接按预设协议给屏幕发指令,全程自主完成。
二、6 大关键维度对比:透传 vs 协议控屏
| 对比维度 | 相机在线(软件 + 485 透传) | 相机脱机(无软件 + 协议控屏) |
|---|---|---|
| 1. 控制主体 | 上位管理软件(核心决策者) | 相机自身(内置硬件 / 固件,核心决策者) |
| 2. 485 的角色 | 透传通道(符合 “透明传输” 定义) | 指令输出通道(非透传,相机主动生成并发送指令) |
| 3. 协议依赖 | 协议由 “管理软件” 定义,相机不解析、不修改协议 | 协议需 “相机与屏幕预先约定”(如FK、KF),相机需解析自身识别结果并按协议生成指令 |
| 4. 数据流向 | 管理软件→相机(透传 485)→屏幕 | 相机(识别模块→协议处理模块→485 接口)→屏幕 |
| 5. 功能灵活性 | 高(控屏内容 / 逻辑靠软件配置,无需改硬件) | 低(控屏内容 / 逻辑固化在相机固件,改需刷固件 / 改配置) |
| 6. 故障影响范围 | 依赖软件 / 网络:软件崩、网络断→485 透传失效→屏幕不显示 | 仅依赖相机 / 屏幕硬件:相机 / 屏幕通电且 485 连线正常→就能工作 |
三、结合停车场实际场景:具象化差异
用 “车辆入场显示” 这个最常见的场景,看两种状态的具体运作过程,差异会更清晰。
场景 1:相机在线(软件 + 485 透传)的运作流程
假设停车场有管理软件,支持 “预约车辆优先、临时车登记” 功能,屏幕需显示 “车牌 + 车辆类型 + 欢迎语”:
- 车牌采集:相机识别入场车辆车牌(如 “粤 A12345”),并将车牌数据传给管理软件(通过网线 / 无线);
- 软件决策:管理软件查询数据库,判断 “粤 A12345 是预约车”,生成控屏指令(比如指令内容:
“显示:粤A12345 | 预约车 | 欢迎入场”,指令格式由软件自定义,如十六进制0x01 0x02 0x41 0x31 0x23...); - 485 透传:管理软件将上述控屏指令,通过网络发给相机的 485 接口;相机不解析指令内容(不管是 “预约车” 还是 “临时车” 指令),直接通过 485 总线 “原样转发” 给屏幕;
- 屏幕显示:屏幕接收指令后,解析软件定义的协议,显示对应的内容 —— 整个过程中,相机只做 “指令搬运工”,不参与任何决策。
场景 2:相机脱机(无软件 + 协议控屏)的运作流程
假设停车场无管理软件,仅需实现 “识别车牌后显示基本信息”(如 “车牌 + 临时车入场”),相机和屏幕需提前约定好控屏协议(比如:“指令开头为 0xAA 表示入场,后续字节为车牌 ASCII 码”):
- 车牌采集 + 自主决策:相机识别入场车辆车牌(如 “粤 B67890”),自身内置逻辑判断 “无预约信息→判定为临时车”;
- 协议指令生成:相机按 “预先约定的 485 协议”,将识别结果转换成控屏指令(比如:
0xAA 0x59 0x75 0x42 0x36 0x37 0x38 0x39 0x30,其中0xAA是入场标识,0x59 0x75是 “粤” 的 ASCII 码,0x42是 “B” 的 ASCII 码,后续是数字); - 485 指令发送:相机直接通过 485 接口,将生成的指令发给屏幕(无透传环节,相机是指令 “生产者” 而非 “搬运工”);
- 屏幕显示:屏幕按 “与相机约定的协议” 解析指令,显示 “粤 B67890 | 临时车 | 请取卡”—— 整个过程无软件参与,相机全程主导。
四、关键差异总结:透传的 “无感知” vs 协议的 “强绑定”
两种状态的核心矛盾,本质是 “控制权归属” 和 “485 通道角色” 的不同,可浓缩为两句话:
- 在线透传:软件 “说了算”,相机 “不管事”
- 优点:灵活(改显示内容、加功能只需改软件,比如新增 “缴费金额显示”)、易联动(可对接缴费系统、会员系统);
- 缺点:依赖软件和网络,一旦软件崩溃或断网,屏幕按照脱机协议显示(设置对的情况下)或者屏幕就 “无指令可显”。
- 脱机协议:相机 “说了算”,屏幕 “认死理”
- 优点:稳定(不依赖外部软件 / 网络,只要相机和屏幕通电、485 连线正常,就能工作,适合无网络或软件故障时的应急场景);
- 缺点:死板(要改显示内容或逻辑,需重新配置相机固件、甚至更换支持新协议的屏幕,比如想加 “剩余车位” 显示,可能要换相机)。
一句话总结核心区别
在线时,485 是 “软件指令的透传管道”,相机不碰数据;脱机时,485 是 “相机指令的输出接口”,相机要自己生成并发送协议指令。
© 版权声明
本站收集的资源仅供内部学习研究软件设计思想和原理使用,学习研究后请自觉删除,请勿传播,因未及时删除所造成的任何后果责任自负。
如果用于其他用途,请购买正版支持作者,谢谢!若您认为「BLOG.SDLINKA.COM」发布的内容若侵犯到您的权益,请联系站长进行删除处理。
本站资源大多存储在云盘,如发现链接失效,请联系我们,我们会第一时间更新。THE END




















暂无评论内容