文章摘要
你是否也遇到车牌识别率低、跟车误识别、弯道车牌倾斜的难题?本文揭秘VZ车牌识别相机的精准安装与场景适配方案,涵盖镜头选型、安装角度、补光策略及六大典型场景应对——从小区出入口到高速收费站,从地库明暗交界到超宽车道,手把手教你打造95%以上识别准确率的智能识别系统,每一个细节都决定成败。
— 此摘要由停车技术员AI分析文章内容生成
一、镜头选型
根据使用距离选择镜头,确保车牌像素在 120-600 像素(最佳 200±20):
| 镜头规格 | 推荐使用距离 | 车牌宽度(像素) | 适用场景 |
|---|---|---|---|
| 6mm(定焦) | 3-6M | 1.5m-7.5m(124-592 像素) | 标准车道(3-4 米宽),固定距离抓拍 |
| 2.8-12mm(变焦) | 2-10M | 1.1m-13m(133-562 像素) | 距离可变场景(如小区入口) |
| 7-22mm(变焦) | 3-15M | 1.9m-18m(129-597 像素) | 中远距离场景(如停车场出口) |
| 5-50mm(变焦) | 3-26M | 1.8m-30m(135-590 像素) | 远距离场景(如高速收费站) |
二、安装组成与参数
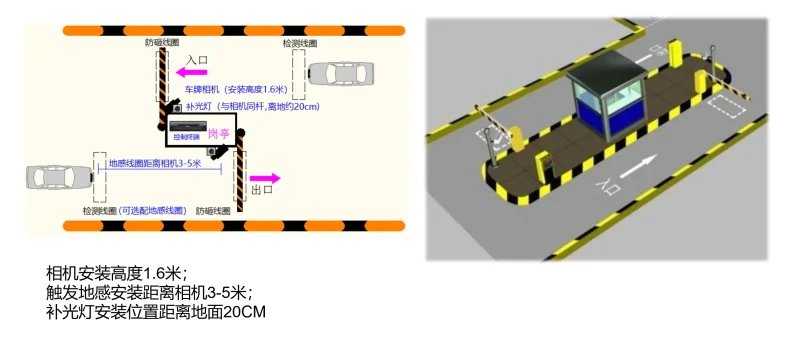
- 核心安装参数设备安装要求备注相机高度 1.5-1.6m(小车为主)、1.6-1.8m(货车为主);俯仰角 15°-40°镜头正对车牌,避免倾斜触发地感距离相机 3-4 米地感线圈宽度≥2 米,与车道同宽补光灯距离地面 20cm,与相机同杆,略低于相机镜头避免强光直射车牌导致过曝
- 安装配件
- 网线 + 电源线:室外用防水无氧铜网线,电源线需适配相机功率(12V/2A)。
- 交换机:百兆 / 千兆交换机,根据相机数量选择端口数(建议预留 2-3 个端口)。
- 三维万向节:调节相机俯仰角(上下)和偏转角度(左右),便于精准对准车道。
- 立柱:直径≥50mm,高度适配相机安装高度,室外需防锈处理。
![图片[1]-VZ车牌识别相机安装部署与场景适配方案-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/10/image-1-1024x446.webp)
三、常见场景安装适配
(一)弯道场景
- 问题:车辆转弯时车牌倾斜,识别准确率低。
- 方案:相机安装在车道外侧,使车辆驶入时车牌正对相机;虚拟线圈画在弯道出口端,确保车牌完全入圈。
(二)喇叭口场景(宽车道 / 短距离)
- 问题:车道宽(>4 米),单相机覆盖不全。
- 方案:
- 道路两侧各装 1 台相机,启用组网功能,共享识别结果。
- 按车牌可信度输出最优结果(可信度≥90% 优先)。
(三)地库场景
- 问题:明暗交界(入口强光、内部昏暗),车牌过曝或欠曝。
- 方案:
- 相机避开明暗交界处,安装在内部昏暗区域或外部强光区域。
- 开启补光灯(等级 6 米),调整曝光时间至 0-1ms,避免过曝。
(四)顺逆光场景
- 顺光(阳光直射车牌):降低曝光量,开启内置补光灯(弱光),减少反光。
- 逆光(阳光直射相机):加高相机、压低俯角,加装遮阳板,避免阳光直射镜头。
(五)跟车场景
- 问题:前车遮挡后车车牌,导致误识别。
- 方案:
- 加高相机、增加俯角,扩大拍摄范围。
- 增加减速带,减缓车速,拉开车辆间距。
- 虚拟线圈和识别区域向下绘制,近距离识别后车。
- 启用组网功能,前后各装 1 台相机,辅助识别。
(六)超宽场景(公交场站 / 道路 > 4 米)
- 方案:
- 道闸和相机后移,使车辆识别时车牌正对相机。
- 增加辅助相机,启用主辅模式,左 / 右辅助识别。
- 中间加栏杆,分 2 条车道,引导车辆按车道行驶。
四、安装验证与调试
- 视频预览:确认车牌像素在 180-220,画面无遮挡、无过曝。
- 识别测试:手动触发或驾车测试,识别准确率≥95% 为合格。
- 开闸测试:白名单车辆触发后,道闸 1-2 秒内开启,无延迟或误开。
- 日志检查:查看 “业务日志”,确认无 “识别失败”“开闸异常” 打印。




暂无评论内容