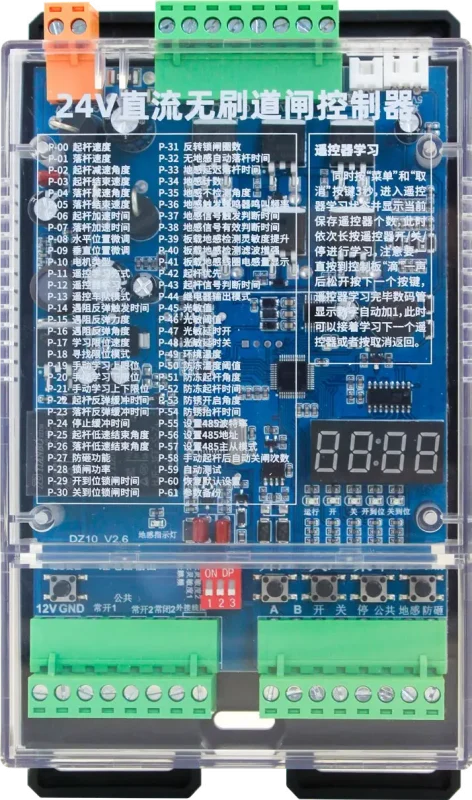
![图片[1]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-1.webp)
使用安全须知
下面是关于产品的正确使用方法、为预防危险、防止财产受到损失等内容,使用设备前请仔细阅读本说明书,并在使用时严格遵守,阅读后请妥善保存说明书。
使用环境要求
- 请在允许的🗎度和温度范围内运输、使用和存储设备。
- 请勿将任何液体流入设备。
- 请将设备安装在通风良好的场所,切勿堵塞设备的通风口。
- 请勿重压、剧烈振动或浸泡设备。
- 请在运输设备时以出厂时的包装或同等品质的材质进行包装。
- 建议将设备上的接地孔接地,提高设备可靠性。
操作与保养要求
- 请勿私自拆卸本设备。
- 请使用生产厂商规定的配件或附件,并由专业服务人员进行安装及维修。
- 配套的杆子不允许加长、截断,不允许私自在杆子上加重。
产品特点
- 安全:24V 直流电源供电,保障人身安全。
- 节能:静态功率小于 2 瓦,可接最大功率 200W 的电机;
- 速度可调:起杆落杆速度独立调节。
- 工作平稳:多段速度设计,使工作状态性能,平稳。
- 安静:工作噪音低于 50db;
- 多重保护:电机过流、过载、短路保护,电机故障保护,电源反接保护;
- 支持外接遥控器输入;
- 支持各种参数可设;
- 支持光敏开启广告闸的灯光;
- 支持防风,防冻,防锈等功能;
- 支持多种继电器输出模式。
规格参数
| 供电电源 | 直流 24V ±10% 10A |
| 电机功率 | 最大 200W |
| 静态功率 | <2W |
| 起杆 / 落杆速度 | 1%-100% 可调 |
| 运行环境温度 | -40℃~ 80℃ |
| 运行环境湿度 | 30% ~ 80%(无凝露) |
功能目录
- P-80 自适应控制系数
- P-00 起杆速度
- P-01 落杆速度
- P-02 起杆减速角度
- P-03 起杆结束速度
- P-04 落杆减速角度
- P-05 落杆结束速度
- P-06 起杆加速时间
- P-07 落杆加速时间
- P-08 水平位置微调
- P-09 垂直位置微调
- P-10 电机类型
- P-11 遥控学习方式
- P-12 遥控器学习
- P-13 遥控车队模式
- P-14 遇阻反弹触发时间
- P-15 遇阻反弹力度
- P-16 遇阻反弹角度
- P-17 学习限位速度
- P-18 寻找限位模式
- P-19 手动学习上限位
- P-20 手动学习下限位
- P-21 手动学习上下限位
- P-22 起杆反弹缓冲时间
- P-23 落杆反弹缓冲时间
- P-24 停止缓冲时间
- P-25 起杆减速结束角度
- P-26 落杆减速结束角度
- P-27 防砸功能
- P-28 锁闸功率
- P-29 开到位锁闸时间
- P-30 关到位锁闸时间
- P-31 反转锁闸圈数
- P-32 无地感自动落杆时间
- P-33 过车延迟落杆时间
- P-34 地感计数
- P-35 地感不检测角度
- P-36 地感触发蜂鸣器鸣叫频率
- P-37 地感信号触发判断时间
- P-38 地感信号有效判断时间
- P-39 板载地感灵敏度提升
- P-40 板载加大地感数据滤波
- P-41 板载地感线圈电感量显示
- P-42 起杆优先
- P-43 起杆信号判断时间
- P-44 继电器输出模式
- P-45 光敏值
- P-46 光敏阈值
- P-47 延时开
- P-48 延时关
- P-49 环境温度
- P-50 防冻温度阈值
- P-51 防冻起杆角度
- P-52 防冻抬杆时间间隔
- P-53 防锈开启角度
- P-54 防锈抬杆时间间隔
- P-55 设置 485 波特率
- P-56 设置 485 地址
- P-57 控制器主从模式
- P-58 手动起杆后自动关闸次数
- P-59 自动测试
- P-60 恢复默认设置
- P-61 参数备份
- P-62 板载地感异常自动复位
- P-63 自适应模式
- P-64 道闸起杆/ 落杆超时时间
- P-65 断电自动起 / 落杆电压
- P-66 刹车反冲电压警告阈值
- P-67 数码管显示驱动电压和驱动电流
- P-68 落杆时触发地感道闸暂停
- P-69 断电自动运行功能
- P-70 定制参数设置
- P-71 过流保护值
- P-72 电源功率
- P-73 无地感自动落杆速度
- P-74 /
- P-75 /
- P-76 /
- P-77 /
- P-78 自动发送道闸状态数据
- P-79 雷达信号优化板载地感
- P-81 自适应模式学习限位功率
- P-82 蓝牙连接
- P-83 起杆地感不检测角度
一、按键说明
控制器有 4 个按键, 从左往右分别是“开 /+”、“关 /-”、“菜单”“停止 / 取消”,可以通过这 4 个按键对控制器的各种参数进行设置。
“开/+”: 正常工作状态下按该按键可以起杆,进入设置状态后可以使用该按键增加菜单项和向上调节设定值。在参数设置状态,短按每次加一。长按则一直连续加到最大值后再从最小值开始往上加。如果长按时间较长,则连续加会提速。
“关 /-”: 正常工作状态下按该按键可以落杆,进入设置状态后可以使用该按键减少菜单项和向下调节设定值。在参数设置状态,短按每次减一。长按则一直连续减到最小值后再从最大值开始往下减。如果长按时间较长,则连续减会提速。
“菜单”:该键有 3 个功能:
1、正常工作模式下长按该键 3 秒进入菜单项选择状态,LED 显示“P-XX”,这时可以按
“开/+”、“关 /-”按键选择菜单项;
2、在菜单项选择状态下短按“菜单”进入设置参数状态;
3、参数设置完毕后短按用于保存退出。
“停止 / 取消”:正常工作时该按键为停止功能,在菜单项选择状态为退出设置状态,在参数设置状态按该键将退出该状态并返回菜单选择状态,即返回上一级菜单,同时设置的值无效。如果在菜单选择状态和参数设置状态下 60 秒内没有按键操作,蜂鸣器长鸣一声后控制器将返回正常工作状态。
二、 显示
控制板有一个四位的 LED 显示屏,可以用于道闸工作状态、参数、菜单项等信息的显示。上电后以低功耗模式运行,这时候 LED 的显示亮度较暗。按任意一个按键将使 LED 显示进入正常工作模式,LED 高亮显示。如果没有按键,60 秒后进入低功耗模式,LED 亮度变暗,减少电源消耗。2
分钟后如果没有按键,则将关闭 LED 显示。进入最低能耗状态。
| P-07 | 落杆加速时间 | 30 | 0-255 | 开始落杆加速到 P-01 设置的落杆速度所需的时间(值越大,时间越长)。(单位 0.01 秒) |
| P-08 | 水平位置微调 | 10 | 0-255 | 杆子水平位置离水平机械限位的距离,数值越大越远,反之亦然。 |
| P-09 | 垂直位置微调 | 10 | 0-255 | 杆子垂直位置离垂直机械限位的距离,数值越大越远,反之亦然。 |
| P-10 | 电机类型 | 0 | 0-3 | 取值范围:0-3;默认:1;由于电机的霍尔极性、道闸机芯的减速级数不一样、道闸有左出杆右出杆之分。所以这个参数用于兼容各种类型的电机和道闸。0:电机正极性,减速机正极性
1:电机正极性,减速机负极性 2:电机负极性,减速机正极性 3:电机负极性,减速机负极性 |
| P-11 | 遥控学习方式 | 0 | 0-1 | 0:依次按下开关停学完1:任意按下一个学完 |
| P-12 | 遥控器学习 | 0 | 0-50 | 遥控器学习:进入 P-12 会显示当前保存遥控器个数,此时按照顺序按下遥控的开关停进行学习,注意要一直按直到控制板“ 滴”一声松开按下一个按键,直到控制板长 “ 滴”一声或者数码管显示的数字往上加一后表示学习完成,可以接着学习下一个或者按取消返回。遥控器删除:在该菜单下,按“+”或“-”修改已学习遥控器数值,点击“菜单键”确定,删除该数值后面的已学习遥控器 |
| P-13 | 遥控车队模式 | 0 | 0-1 | 0:正常遥控模式;1:遥控“开”进入车队模式,在手动按下落杆之前不会处理地感信号,一直起杆状态;(正常遥控模式临时进入车队模式方法:当设置值为 0 时。道闸完全开启后,可以长按遥控器开按键 5 秒钟以上,可临时进入车队模
式,蜂鸣器会长鸣 2 秒。按关则退出 车队模式,同时道闸关闭) |
| P-14 | 遇阻反弹触发时间 | 5 | 1-40 | 遇到阻碍多长时间判断为遇阻了。(单位:0.05 秒) |
三、 参数设置
可以通过长按“菜单”按键 3 秒进入参数设置状态,LED 将显示“P-XX”。通过短按或者长按“开 /+”、“关 /-”两个按钮选择菜单项,短按一次加一或者减一,长按则连续加减。再次按“菜单”键进入指定项的设置,按“停止 / 取消”键返回上一级或者退出设置。当对指定参数设置完成以后,必须按“菜单”键确认才能生效。按“停止 / 取消”键设置的参数不会生效。 60 秒内没有按键,控制板上的蜂鸣器将长鸣一声,退出设置状态,返回正常工作状态。
直流无刷道闸控制器命令列表:
备注:部分预设默认值的版本与表格所列的默认值有差异。
| 菜单 | 功能 | 默认值 | 范围 | 功能说明 |
| P-00 | 起杆速度 | 60 | 10-200 | 数值越大,速度越快,数值越小,速度越慢;当调到 200 依旧无法达到需要的速度时,可将 P-72 加大。(当 P63 为 0 或者 1 时,超 过 100 则当成 100;当 P63 设置为 2 时,超 过100 有效) |
| P-01 | 落杆速度 | 60 | 10-200 | 同起杆速度。 |
| P-02 | 起杆减速角度 | 45 | 10-90 | 用于设置起杆过程中,开始减速的位置。以角度为单位,道闸杆为水平位置时表示 0 度,为垂直位置时表示 90度。该参数表示道闸杆开到这个角度时开始减速。 |
| P-03 | 起杆结束速度 | 10 | 1-80 | 以该速度结束起杆,过小将导致开不到位,过大将导致晃动。 |
| P-04 | 落杆减速角度 | 70 | 0-80 | 用于设置落杆过程中,开始减速的位置。以角度为单位,道闸杆为水平位置时表示 0 度,为垂直位置时表示 90度。该参数表示道闸杆落到这个角度时开始减速。 |
| P-05 | 落杆结束速度 | 15 | 1-80 | 以该速度结束落杆,过小将导致关不到位,过大将导致晃动。如果 P-26命令设置了落杆低速角度,并且在有效的范围内,则在低速匀速区以该速度运行。 |
| P-06 | 起杆加速时间 | 30 | 0-255 | 开始起杆加速到 P-00 设置的起杆速度所需要的时间(值越大,时间越长)。(单位 0.01 秒) |
| P-22 | 起杆反弹缓冲时间 | 80 | 10-255 | 起杆到落杆缓冲时间,时间过短容易出现瞬时电流过大。(单位 0.01 秒) |
| P-23 | 落杆反弹缓冲时间 | 50 | 10-255 | 落杆到起杆的缓冲时间,时间过短容易出现瞬时电流过大。(单位 0.01 秒) |
| P-24 | 停止缓冲时间 | 60 | 10-255 | 从起杆或者落杆按下停止,电机由运动到停止所需时间,过大会停的很慢,很稳,时间过短容易出现瞬时电流过大。(单位 0.01 秒) |
| P-25 | 起杆减速结束角度 | 90 | 45-90 | 起杆运动中,杆子会先加速至 P-00,然后在 P-02 处开始减速,在此选项时停止减速并进入匀速运动直到起杆结束。 |
| P-26 | 落杆减速结束角度 | 0 | 0-45 | 落杆运动中,杆子会先加速至 P-01,然后在 P-04 处开始减速,在此选项时停止减速并进入匀速运动直到落杆结束。 |
| P-27 | 防砸功能 | 1 | 0-4 | 防砸端口信号是否有效,0:无效,触发防砸信号不起杆,1:有效,落杆过程触发防砸信号起杆,2:防砸接口复用为“开”接口功能,3:防砸接口复用为“关”接口功能,4:防砸接口复用为地感接口功能。(防砸接口复用功能后,原该功能的接口无效)。 |
| P-28 | 锁闸功率 | 8 | 0-21,255 | 电机停止在非机械锁闸区域时,由于无机械锁闸,弹簧弹力会将杆子拉起,此功能为控制器输出控制进行锁闸,会导致电机和板子发烫,建议根据实际情况进行设置,不能过大。当设置值为 255 时,为自动适应锁闸功率。 |
| P-29 | 开到位锁闸时间 | 0 | 0-255 | 杆子开到位时锁闸多长时间关闭锁闸。(单位 : 秒)当设置值为 255 时,开到位时一直保持锁闸,不做计时。 |
| P-30 | 关到位锁闸时间 | 0 | 0-255 | 杆子关到位时锁闸多长时间关闭锁闸。(单位 : 秒)当设置值为 255 时,关到位时一直保持锁闸,不做计时。 |
| P-31 | 反转锁闸圈数 | 0 | 0-20 | 在起杆时若因为各种原因使电机反转,转过多少圈后锁闸。 |
| P-32 | 无地感自动落杆时间 | 0 | 0-255 | 没有地感触发杆子自动落下时间,设置为 0 表示没有地感不自动落杆。(单位:秒) |
| P-33 | 过车延迟落杆时间 | 2 | 0-255 | 地感信号消失后多长时间后开始落杆,默认 0.2 秒。(单位:0.1 秒) |
| P-15 | 遇阻反弹力度 | 45 | 1-100 | 遇到多大的阻力认为遇阻。反弹条件为遇到 P-15 设置的阻力并且持续了P-14 的时间然后起杆反弹。 |
| P-16 | 遇阻反弹角度 | 2 | 0-90 | 当杆子低于此选项角度时,不会进行遇阻反弹,0 为关闭次功能。 |
| P-17 | 学习限位速度 | 40 | 10-80 | 设置找上限位和找下限位不同的速度,进入菜单后,首先设置的是找上 限位的速度,数码管显示“1-XX”, XX 表示找上限位的速度,可以通过按 “开 /+”和“关 /-”两个按键调节速度。上限位速度设置完成后,按“菜单”键,数码管显示“2-XX”,这时 XX 表示找下限位的速度。同样可以通过按 “开/+”和“关 /-”两个按键调节速度。最后找上下限位速度都设置完成后,按“菜单”键保存参数。如果设置过程中按“ 停止 / 取消”键,设置的参数无效。 |
| P-18 | 寻找限位模式 | 0 | 0-2 | 0:寻找双限位。1:寻找上限位。2:寻找下限位。 |
| P-19 | 手动学习上限位 | 无 | 无 | 进入该设置后,数码管显示 L-00,杆子自动起杆到位停止,显示 L-01,操作跟P-21 一样,寻找垂直和水平限位,学完水平会自动退回设置页面,表示成功,然后将P-18 设置为1 即可使用。 |
| P-20 | 手动学习下限位 | 无 | 无 | 与 P-19 一致,只是反过来了。进入设置显示 L-00,自动寻找下限位,到位停止,显示 L-01,用户手动找水平和垂直位置,按下第一次确定即为水平位置,显示 L-02,第二次为垂直位置并退回设置页面,然后将 P-18 设置为 2 即可使用。 |
| P-21 | 手动学习上下限位 | 无 | 无 | 进入该设置后,数码管显示 L-00,闸机先自动落杆,到位后显示 L-01,自动起杆到位时停止,显示 L-02。此时按住抬杆或者落杆杆子就会起杆或者落杆,松开即会停止,到机械限位即会报警。用户可自行调整位置,确定好按下菜单学习一个限位,第一次按下菜单的为垂直限位,数码管显示 L-03,第二次为水平限位,按下第二次后会自动回到设置页面,表示学习成功,此功能设置完还需要将 P-18设置 0。 |
| P-34 | 地感计数 | 1 | 0-4 | 0:不 进行起杆计数,过车落杆。1:对起杆信号进行计数,计数值最大为 1,在触发地感时对计数进行自减,地感消失且计数为 0 时落杆; 2:对起杆信号进行计数,计数值最大为 2,在触发地感时对计数进行自减,地感消失且计数为 0 时落杆; 3:对起杆信号进行计数,计数值最大为 3,在触发地感时对计数进行自减,地感消失且计数为 0 时落杆; 4:对起杆信号进行计数,计数值最大为 255,在触发地感时对计数进行
自减,地感消失且计数为 0 时落杆; |
| P-35 | 地感不检测角度 | 0 | 0-45 | 杆子角度低于此值时将不会处理地感信号,直接落杆。 |
| P-36 | 地感触发蜂鸣器鸣叫频率 | 4 | 0-20 | 地感触发时蜂鸣器鸣叫频率,0 为关闭,数字越大鸣叫速度越快。 |
| P-37 | 地感信号触发判断时间 | 4 | 1-255 | 信号保持多长时间认为触发地感(。单位:0.01 秒) |
| P-38 | 地感信号有效判断时间 | 4 | 1-255 | 地感触发时,仍然一直触发多长时间认为这是真的地感信号即有车(。单位:0.01 秒) |
| P-39 | 板载地感灵敏度提升 | 0 | 0-1 | 0:关闭灵敏度提升1:打开灵敏度提升 |
| P-40 | 板载加大地感数据滤波 | 0 | 0-1 | 当地感容易出现误判时使用,该项打开会影响地感响应灵敏度0:关闭 1:打开 |
| P-41 | 板载地感线圈电感量显示 | 无 | 无 | 显示当前地感线圈电感量 (uH),该项功能使用的时候,如果跳频拨码开关在 ON 状态,需要拨到 OFF,并复位地感。 |
| P-42 | 起杆优先 | 0 | 0-250-80 | 0:在任何状态下所有控制信号优先级一样。1:起杆优先级最高,在起杆时其他信号无用。2:在起杆过程中,如果车辆已经通过地感,则立即启动落杆,而不用等到道闸开到位以后才落杆。50-80:在起杆过程中,如果车辆在开到位前已经通过地感,则道闸在开
到该设定值的角度时立即启动落杆。 |
| P-43 | 起杆信号判断时间 | 5 | 1-255 | 起杆信号持续多长时间认为是有效起杆信号。(单位:0.01 秒) |
| P-44 | 继电器输出模式 | 0 | 0-10 | 默认:0。控制器有两个继电器。继电器的输出可以通过设置输出模式,满足不同的应用需求。0: 通行灯模式(继电器 1: 继电器 1 开到位时断开。继电器 1 关到位时闭合。继电器 2:继电器 2 开到位时闭合,继电器 2 关到位时断开)
1:广告灯模式(继电器 1:用于广告道闸 , 根据外接的光感开启 / 关闭广告道闸的灯光。继电器 2: 继电器 2关到位后人为抬杆到超过 5 度闭合 继电器,可用于接报警器实现报警。) 2:地感模式 ( 继电器 1:继电器 1 开始抬杆时闭合,继电器 1 关到位时断开。继电器 2:不使用。) 3:红绿灯模式 1( 继电器 1: 同广告 灯模式,用于广告道闸 , 根据外接的光感开启 / 关闭广告道闸的灯光。继电器 2:常闭接红灯,常开接绿灯。道闸开到位后继电器闭合亮绿灯,否则继电器断开亮红灯。) 4:红绿灯模式 2( 继电器 1:接红灯,道闸开始关时闭合,道闸开到位后断开。 继电器 2:接绿灯,道闸开到位 后继电器闭合,道闸开始关时断开。) 5:脉冲模式(继电器 1:闭合 1 秒钟 后断开。继电器 2:道闸关到位后继 电器闭合。道闸开到位后继电器断开。) 6:红绿灯模式 3( 继电器 1: 同广告 灯模式,用于广告道闸 , 根据外接的 光感开启 / 关闭广告道闸的灯光。继 电器 2:常闭接红灯,常开接绿灯。道闸角度大于 60°继电器闭合亮绿灯, 否则继电器断开亮红灯。) 7:红绿灯模式 4( 继电器 1:继电器 1 起杆时断开,继电器 1 落杆时闭合。继电器 2:继电器 2 起杆时闭合,落 杆时断开。) 8:道闸关到位时继电器 1 闭合,道闸开到位时继电器 2 闭合,道闸运行中以及在中间暂停状态两个继电器均断开。 |
| P-44 | 继电器输出模式 | 0 | 0-10 | 9:红 绿 灯 模 式 5,继电 器 1 – 根据 外 接 的 光 感 开 启 / 关 闭 广 告道 闸 的 灯 光。继 电 器 2 – 道 闸关 到 位时 闭合,其他状 态 断 开。 10:脉冲模式 2,继电器 1 – 道闸有开闸时,闭合 1 秒断开,可用作同起同落同步信号。继电器 2 – 道闸关到位后继电器闭合。道闸开到位后继电器断开。 |
继电器输出模式与继电器开关闭合之间的关系表:
| 模式 端口 | 继电器 1 | 继电器 2 |
| 0:通行灯模式 | 继电器 1 开到位时断开。继电器 1 关到位时闭合。 | 继电器 2 开到位时闭合继电器 2 关到位时断开 |
| 1:广告灯模式 | 用于广告道闸 , 根据外接的光感开启 / 关闭广告道闸的灯光。 | 继电器 2 关到位后人为抬杆到超过 5 度闭合继电器,可用于接
报警器实现报警。 |
| 2:地感模式 | 继电器 1 开始抬杆时闭合,继电器 1 关到位时断开。 | 不使用。 |
| 3:红绿灯模式 1 | 同广告灯模式,用于广告道闸 ,根据外接的光感开启 / 关闭广告道闸的灯光。 | 常闭接红灯,常开接绿灯。道闸开到位后继电器闭合亮绿灯,否则继电器断开亮红灯。 |
| 4:红绿灯模式 2 | 接红灯,道闸开始关时闭合,道闸开到位后断开。 | 接绿灯,道闸开到位后继电器闭合,道闸开始关时断开。 |
| 5:脉冲模式 1 | 道闸关到位时,闭合 1 秒钟后断开。 | 道闸关到位后继电器闭合。道闸开到位后继电器断开。 |
| 6:红绿灯模式 3 | 同广告灯模式,用于广告道闸 ,根据外接的光感开启 / 关闭广告道闸的灯光。 | 常闭接红灯,常开接绿灯。道闸角度大于60°继电器闭合亮绿灯,否则继电器断开亮红灯。 |
| 7:红绿灯模式 4 | 继电器 1 起杆时断开,继电器 1落杆时闭合。 | 继电器 2 起杆时闭合,落杆时断开。 |
| 8:道闸工作状态模式 | 道闸关到位时闭合,道闸运行中以及在中间暂停状态断开。 | 道闸开到位时闭合,道闸运行中以及在中间暂停状态断开。 |
| 9:红绿灯模式 5 | 根据外接的光感开启 / 关闭广告道闸的灯光。 | 道闸关到位时闭合,其他状态断开。 |
| 10:脉冲模式 2 | 道闸有开闸时,闭合 1 秒断开,可用作同起同落同步信号。 | 道闸关到位后继电器闭合。道闸开到位后继电器断开。 |
| 11:脉冲模式 3 | 根据外接的光感开启 / 关闭广告道闸的灯光。 | 道闸有开闸时,闭合 1 秒断开,可用作同起同落同步信号。 |
P-44 广告灯接线图
![图片[2]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-2.webp)
P-44 红绿灯接线图
(如下图所示,为共阴灯带的接线示意图;共阳灯带将电源的 12V 和 GND 反接即可)
![图片[3]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-3.webp)
| P-45 | 光敏值 | 无 | 无 | 当前环境的一个光照强度,数值越小越明亮。 |
| P-46 | 光敏阈值 | 70 | 0-200 | 当前环境光照强度大于此值且 P-44相关设置了则会输出继电器信号。 |
| P-47 | 延时开 | 10 | 0-255 | 当前光照大于 P-46 时延时多长输出继电器信号。(单位:秒) |
| P-48 | 延时关 | 250 | 0-255 | 当前环境光照低于 P-46 时延时多长时间关闭继电器输出。(单位:秒) |
| P-49 | 环境温度 | 无 | 无 | 此选项用于数码管显示当前环境温度。 |
| P-50 | 防冻温度阈值 | 0 | -40-0 | 低温时,防止机器冻住,开启该功能后当温度低于该选项设置的温度时,闸机如果间隔P-52 的时间内未运动,则自动运行到P-51 角度,然后关闭。 |
| P-51 | 防冻起杆角度 | 0 | 0-45 | 范围:0-45,默认:0,防冻时开启角度,当环境温度降至P-50 设定的温度后, P-52 防冻时间间隔命令设定的定时时间到了以后,道闸将开启到该参数设定的角度,然后自动关闭。如果该参数为 0,则关闭防冻功能。只有 P-51和P-52 同时不为0,则开启防冻功能。 |
| P-52 | 防冻抬杆时间间隔 | 0 | 0-255 | 当环境温度低于设定的温度后开始定时,定时时间内如果道闸无运行动作,则到达改命令设置的时间间隔后,道闸开启 P-51 设定的角度,然后再自动关闭。该参数设置为 0 则关闭防冻功能。(单位:分钟) |
| P-53 | 防锈开启角度 | 0 | 0-45 | 防锈起杆时的角度,配合如果该参数不为 0,则没经过 P-54 命令指定的时间间隔后,控制器将开启该参数指定的角度,然后再自动关闭。正常工作时道闸的起杆、落杆将清零时间间隔,重新开始时间间隔的定时。如果该参数为 0,则关闭防锈功能。 |
| P-54 | 防锈抬杆时间间隔 | 0 | 0-255 | 道闸安装到场地,如果长时间不启用,可能会生锈,可以开启设置该参数,使道闸过一定时间间隔开启一次。开启的角度通过 P-53 命令设置。如果该参数为 0,则关闭防锈功能。必须 P-53 和 P-54 同时不为 0 才能开启防锈功能。(单位:小时) |
| P-55 | 设置 485 波特率 | 0 | 0-4 | 设置控制板的波特率,设置参数: 0:9600;1:19200;2:38400;3:57600;4:115200 |
| P-56 | 设置 485 地址 | 0 | 0-255 | 该控制板在 485 总线上的地址。 |
| P-57 | 控制器主从模式 | 0 | 0-1 | 设置控制板的主从模式:0:从机模式 1:主机模式 |
| P-58 | 手动起杆后自动关闸次数 | 0 | 0-255 | 在关到位时,人为抬杆超过 10°时机器会自动落杆,这个参数即为落几次,手动抬杆并落杆次数超过该值时则不会再次触发落杆。每次正常起落一次,累计自动落杆计数会清零。如果设置值为 255,则不做计数该功能一直有效。 |
| P-59 | 自动测试 | 0 | 0-255 | 自动测试时间间隔。为 0 时表示关闭自动测试,用于自动测试和老化测试,测试完成后将该参数设置为 0 即可解除自动测试。短按“开”按键启动开 / 关到位自动测试,长按“ 开”按键启动模拟落杆到中间位置时起杆自动测试。(单位:秒) |
| P-60 | 恢复默认设置 | 0 | 0-255 | 该选项有四个功能:清除遥控器、部分恢复参数备份数据、部分恢复出厂设置和完全恢复出厂设置。为了防止误操作,需要设置特定的值后 , 再按 “菜单”键才能完成操作。5:清空遥控
6:恢复参数备份数据(已学遥控器不清除) 10:恢复出厂设置(遥控和电机类型不恢复) 15:完全恢复出厂设置 |
| P-61 | 参数备份 | / | / | 在设置模式下,长按“ 菜单”按键 3S,会自动保存当前道闸所有设置值(除 P-12 遥 控器学习外)并长鸣两声,数码管显示本次保存参数的序号
2 秒然后退出。 |
| P-62 | 板载地感异常自动复位 | 1 | 0-1 | 0:禁用,1:启用。启用该功能时,板载地感如果出现触发后不关闭,在接收到 3 次外接“ 开”信号后,会检测下一辆车通过道闸信号,在下一辆车通过并离开地感线圈时,自动复位地感并落杆。 |
| P-63 | 自适应模式 | 2 | 0-2 | 0:常规模式;1:初始化限位使用自适应模式;2:初始化限位和起落杆
均使用自适应模式。 |
| P-64 | 道闸起杆 / 落杆超时时间 | 20 | 6-40 | 设置道闸起杆/ 落杆超时时间,如果道闸起杆 / 落杆超过设定时间未到位,则道闸自动暂停并报起杆超时警 告(Err5)或者落杆超时警告(Err6)。(单位 秒) |
| P-65 | 断电自动起 / 落杆电压 | 0 | 0-21 | 0:关闭;1:21 触发自动起 / 落杆电压,该功能需要配备后备电源,同时与 P-69 设置项配合设置,建议设置为 20 。 |
| P-66 | 刹车反冲电压警告阈值 | 32 | 30-40 | 针对道闸弹簧匹配不好的情况下,电机减速产生反冲电压过高提示警告;提示声为蜂鸣器快鸣 5 声,数码管显示ERR2,该警告不会中断道闸运行;可通过降低道闸运行速度,或者匹配好弹簧和杆的平衡来减小反冲电压的效果。(单位:V)。设置值为 0 时关闭该提示警告。 |
| P-67 | 数码管显示驱动电压和驱动电流 | 1 | 0-1 |
(单位 A),可以在工作模式下,通过短按“菜单”按键切换显示电流还是 电压。 |
| P-68 | 落杆时触发地感道闸暂停 | 0 | 0-1 | 0:落杆过程中触发地感时,道闸自动起杆;1:落杆过程中触发地感时,道闸在当前位置停止(可一定程度起到防逃费
作用)。 |
| P-69 | 断电自动运行功能 | 1 | 0-4 | 设置断电自动运行选项,当 P-65 设置不为 0 时,检测到供电电压低于 P-65 设置值时道闸的处理方法; 0: 不处理;1: 自动起杆;2: 自动落杆;3: 道闸处于开/ 关到位时不处理,在
中间位置时自动起杆; 4: 道闸处于开/ 关到位时不处理,在中间位置时 自动低速落杆。 |
| P-70 | 定制参数设置 | / | / | 暂无作用 |
| P-71 | 过流保护值 | 140 | 20-160 | 过流保护值,当道闸运行电流超过改值时,道闸自动停止运行。如果是落杆出现过流保护,道闸会当成遇阻反弹处理。(单位:0.1A) |
| P-72 | 电源功率 | 100 | 20-100 | 道闸运行过程中,最大限制输出功率 % |
| P-73 | 无地感自动落杆速度 | 0 | 0-80 | 无地感自动落杆速度,当设置为 0 时无效,无地感自动落闸使用 P-01(落杆速度)作为落杆运行速度;当设置值为非 0 时,用改参数替代 P-01( 落杆速度)作为落杆运行速度。该功能解决无地感自动落杆时,速度过快可能砸到行人的问题,可设置相对小一点的自动落杆速度参数,防止
自动落杆砸到行人。 |
| P-74 | / | / | / | |
| P-75 | / | / | / | |
| P-76 | / | / | / | |
| P-77 | / | / | / | |
| P-78 | 自动发送道闸状态数据 | 0 | 0-1 | 当设置为 1 时,道闸触发起 / 落杆动作,则自动发送道闸状态指令。 |
| P-79 | 雷达信号优化板载地感 | 0 | 0-3 | 针对外接雷达检测过车,并且同时使用板载地感的道闸,通过雷达输出信号优化解决地感异常不落杆的问题。
(该功能结合了地感和雷达各自的优点,并解决了地感异常导致不落杆、雷达容易目标丢失导致异常落杆的 问题) |
| P-80 | 自适应控制系数 | 4 | 0-9 | 自适应控制参数,对于部分特殊道闸,优化效果使用(非专业人员不建议调该项参数) |
| P-81 | 自适应模式学习限位功率 | 50 | 10-80 | 自适应模式下,学习限位最大功率设置;对于部分功率较小的电源,如果出现学习限位时电源过流保护,可将该参数减小;对于弹簧配重不好,学习限位起 / 落杆电机扭力不够,将该参数加大。 |
错误代码
在控制器检测到异常时,会通过错误代码显示来指示错误的类型。具体如下:
| 错误代码 | 错误原因 |
| Err0 | 在清除遥控器和恢复出厂设置,需要设置正确的确认值,确认值不正确将提示 Err0 错误。 |
| Err1 | 保留。 |
| Err2 | 刹车反冲电压过高警告,一般由于弹簧匹配不好且速度过快引起,可通过匹配好弹簧跟杆的平衡,以及减小运行速度解决。也可以加大 P-66 设置值增加触发阈值。 |
| Err3 | 起杆堵转,可能原因:道闸弹簧断了、起杆速度过小、起杆结束速度过小。可以加大起杆速度和起杆结束速度。 |
数码管显示信息的含义:
| 内容 | 含义 |
| IDLE | 未接电机,或者电机霍尔故障,可能原因为接线松动 |
| STOP | 道闸关到位 |
| CLOS | 道闸正在关 |
| OPEN | 道闸正在开 |
| HOLD | 道闸开到位 |
| LOCK | 道闸已锁定 |
| FLET | 车队模式 |
四、功能示意图
| P-82 | 蓝牙连接 | / | / | 小程序首次通过蓝牙连接主板,请进入 P82 菜单,然后连接主板蓝牙进行连接。小程序有该主板连接数据后,可不用进入 P82 菜单,直接连接蓝牙进入。 |
| P-83 | 起杆地感不检测角度 | 20 | 0-80 | 起杆过程中,地感低于设置角度时地感触发无效。 |
- 通过 P-08/P-09 调节水平位置、垂直位置示意图
| Err4 | 落杆堵转,可能原因:道闸弹簧太紧、未挂道闸杆、落杆速度或者落杆结束速度过小。检查弹簧是否太紧,是否挂道闸杆,增加落杆速度或者落杆结束速度。 |
| Err5 | 起杆超时,原因是起杆时间超过 15 秒。可增加起杆速度和起杆结束速度 。 |
| Err6 | 落杆超时,原因是落杆时间超过 15 秒。可增加落杆速度和落杆结束速度 。 |
| Err7 | 电机类型选择错误,可通过 P-10 改为正确的类型 。 |
| Err8 | 保留。 |
| Err9 | 起杆过程中,出现弹簧断了等情况导致电机反转 。 |
![图片[4]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-4.webp)
- 无低速运行区的起杆示意图(P-25 大于等于 90) 4. 无低速运行区的落杆示意图(P-26 等于 0)
![图片[5]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-5.webp)
![图片[6]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-6.webp)
- 带低速运行区的起杆示意图(P-25 小于 90 且 P-25 大于 P-02)
5. 带低速运行区的落杆示意图(P-26 不为 0 并且 P-26 小于 P-04)
![图片[7]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-7.webp)
![图片[8]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-8.webp)
五、道闸控制器接线图
直流无刷接线示意图:
直流无刷电机接线示意图
![图片[9]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-9.webp)
GND 24V
![图片[10]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-10.webp) 板载地感说明:
板载地感说明:
![图片[11]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-11.webp)
![图片[12]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-12.webp)
![图片[13]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-13.webp)
![图片[14]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-14.webp)
![图片[15]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-15.webp)
![图片[16]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-16.webp)
![图片[17]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-17.webp)
![]()
![图片[19]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-19.webp)
![图片[20]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-20.webp)
![图片[21]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-21.webp)
![]()
道闸主板拨码开关图
地感工作频率调节
用户可以更改线圈的工作频率以避免相邻线圈或环境频率的干扰。本产品板载地感提供两种频率选择,可由面板上的拨码开关编号 1 按照(下)图进行设置。
ON
1
ON
1
低频 高频
灵敏度调节
灵敏度调节使用面板上的拨码开关编号 2 和编号 3,共有 4级。具体设置见下表。在试运行时,先将灵敏度设在低档,在实际测试后如果车辆检测无输出,则将灵敏度提高一档,如此反复,直至车辆检测器正常、稳定工作。
| ON2 3 | ON2 3 | ON2 3 | ON2 3 |
低 中低 中高 高
道闸控制器孔间距尺寸图:
![图片[23]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-23.webp)
![图片[24]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-24.webp)
![图片[25]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-25.webp)
![图片[26]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-26.webp)
![图片[27]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-27.webp)
![图片[28]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-28.webp)
![图片[29]-ZMT直流无刷道闸控制器说明书-停车技术员](https://blog.sdlinka.com/wp-content/uploads/2025/11/word-image-2564-29.webp)
![]()
本站收集的资源仅供内部学习研究软件设计思想和原理使用,学习研究后请自觉删除,请勿传播,因未及时删除所造成的任何后果责任自负。
如果用于其他用途,请购买正版支持作者,谢谢!若您认为「BLOG.SDLINKA.COM」发布的内容若侵犯到您的权益,请联系站长进行删除处理。
本站资源大多存储在云盘,如发现链接失效,请联系我们,我们会第一时间更新。


暂无评论内容